産業用人協調ロボット
UNIVERSAL ROBOTS
導入のメリット
独自開発のフィルムスイッチ装着で更に安心度がアップ

セットアップが早い
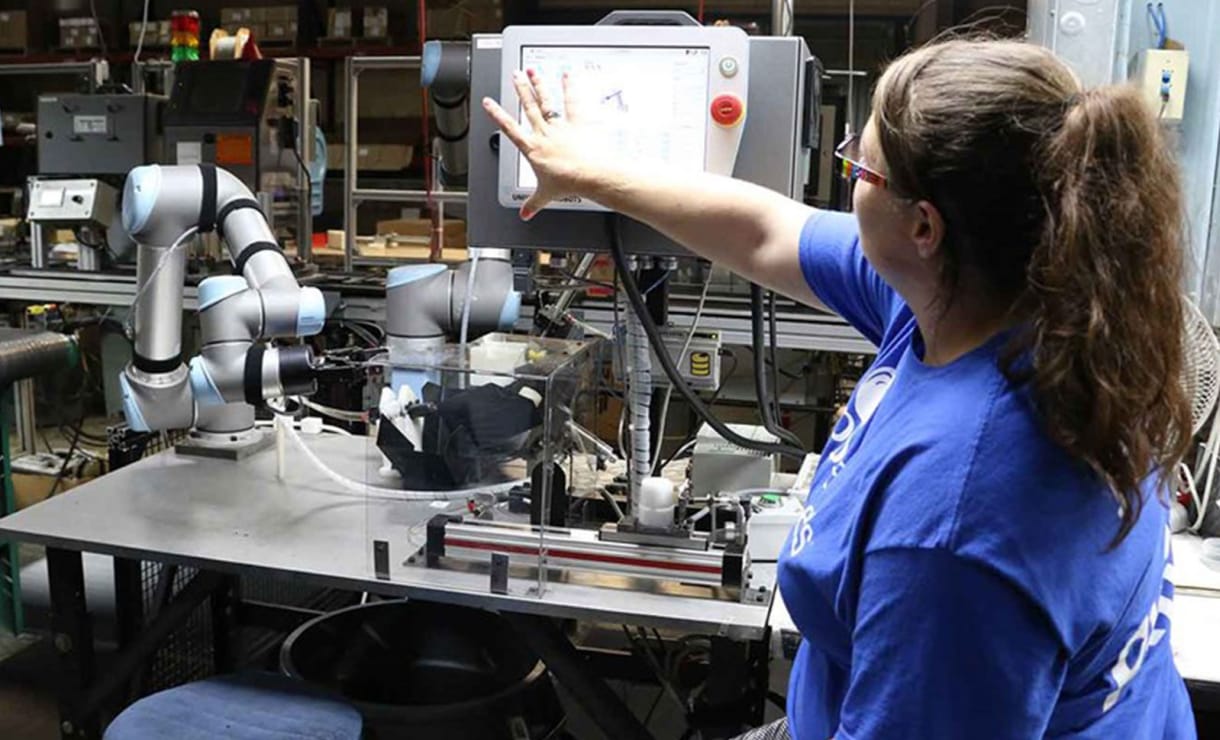
プログラムが簡単

ダイレクトティーチングが可能

さまざまな現場で活用

人にも物にも優しい搬送が可能
導入事例
協働ロボットアームは、日々ありとあらゆる産業分野においてパフォーマンスを向上させ、付加価値を与え続けています。
貴社の業界でプロセスの自動化が可能な協働ロボットを、次の例から見つけることができます。
品質を向上、生産を最適化およびパフォーマンスを改善します。
CNCマシンなどの重機に近接して作業する⼈間のオペレーターに関連した身体傷害のリスクを低減しながら作業速度を改善します。ロボットアームが作業員に接触した場合、特許付き技術により接触時の力を制限します。URロボットは、⼈間が作業区域に入った時には低速モードで操作し、退出時には全速を回復するようにプログラムすることもできます。
生産ラインの最適化を目指す中小企業向けに将来も通用するプラットフォームを提供します。お客様のワークフローに変更があった場合、URロボットはその小型サイズと軽量設計のために新たなコンステレーションで迅速かつ容易に配置できます。
ピック・アンド・プレイスのタスクを処理するためフルフィルメントセンターでピック・アンド・プレイス用ロボットを使用して精度を高め、廃棄品を低減します。URロボットは、従業員の帰宅後でも貴社のビジネスにとって必要な在庫処理ができるように、ピック・アンド・プレイス作業をロボットの判断で実行することができます。URロボットアームは、直感的でプログラムが容易なインターフェイスにより、小規模な生産体制に最適です。反復的なピック・アンド・プレイスのタスクで協働ロボットアームを使用すれば、生産性と柔軟性のメリットが得られ、より重要なタスクのために従業員を解放できます。
重機に接近して行う作業につきものの、人身事故の危険を低減させながら、速度と工程の質を向上させます。適切なアダプタメカニズムを備えた UR協働ロボットアームは、プラスチック、木材、金属やその他の材料の組み立て作業を処理できます。アセンブリロボットが作業員に接触した場合、当社の特許付き技術により接触時の力を制限します。URロボットは、人間が作業区域に入った時には低速モードで操作し、退出時には全速を回復するようにプログラムすることもできます。
生産ラインの最適化を目指す中小企業向けに将来も通用するプラットフォームを提供します。お客様のワークフローに変更があった場合、アセンブリロボットアームはその小型サイズと軽量設計のために新たなコンステレーションで迅速かつ容易に配置できます。
直感的なソフトウェアを通じて、ほとんど経験のないユーザーでも、所定の位置にロボットを移動させることで、プログラミングの基礎の把握とウェイポイントの設定を容易に実行できます。
厳格な時間管理が要求される試験および分析作業に適した24時間年中無休体制を維持しながら、最高の柔軟性を実現するようシステムをカスタマイズします。精度と⼀貫性がプロジェクトの成功の鍵であるとき、ロボットの導入がそれを実現する答えとなります。ロボットは一貫した反復作業により正確な工程に従い、予め定義されたワークフローをこなし、その偏差も非常に小さく、研究や分析に最適な条件を提供します。
一貫性および予測可能な品質を保証する。それには全く同一の精度で長時間にもわたり何度も同一の動作を反復するという超人的な能力が必要になります。この理由からURロボットアームの+/-0.1 mm (.004インチ) の許容範囲での反復可能性はクイックプレシジョン処理を自動化するために理想的なのです。
精度と一貫性がプロジェクトの成功の鍵であるとき、ロボットの導入がそれを実現する答えとなります。締め付けすぎのリスクを減らし、常に正しい圧力を維持することにより、プロジェクトにかかわらず、製品の品質と一貫性を向上させます。ロボットは一貫した反復作業により正確な工程に従い、非常に小さい偏差で予め定義されたワークフローをこなします。
それには全く同一の的確さで長時間にもわたり何度も同一の動作を反復するという超人的な能力が必要になります。この理由からURロボットアームの+/- 0.1 mm (.004インチ) の許容範囲での反復可能性はクイックプレシジョン処理を自動化するために理想的なのです。
ねじ専用の作業用途には、UR3上の終端ジョイントが無制限の回転を提供します。UR3の終端ジョイントは、ロボットの独自の動力制御と組み合わされて、コストのかかるトルク制御されたねじ止めツールが不要でねじ止めアプリケーションに直接配置できます。
人協調ロボットの主な用途
- 研究機関における分析と試験
- 接着、溶接
- 組み立て、ピック・アンド・プレイス
- CNC
- 梱包およびパレタイジング
- ネジ(M8以下)締め/緩め
- 射出成形の取り出し
- 塗装(水溶性塗料)
- はんだ付け
- 自動車製造
- 研磨
- 品質検査 等
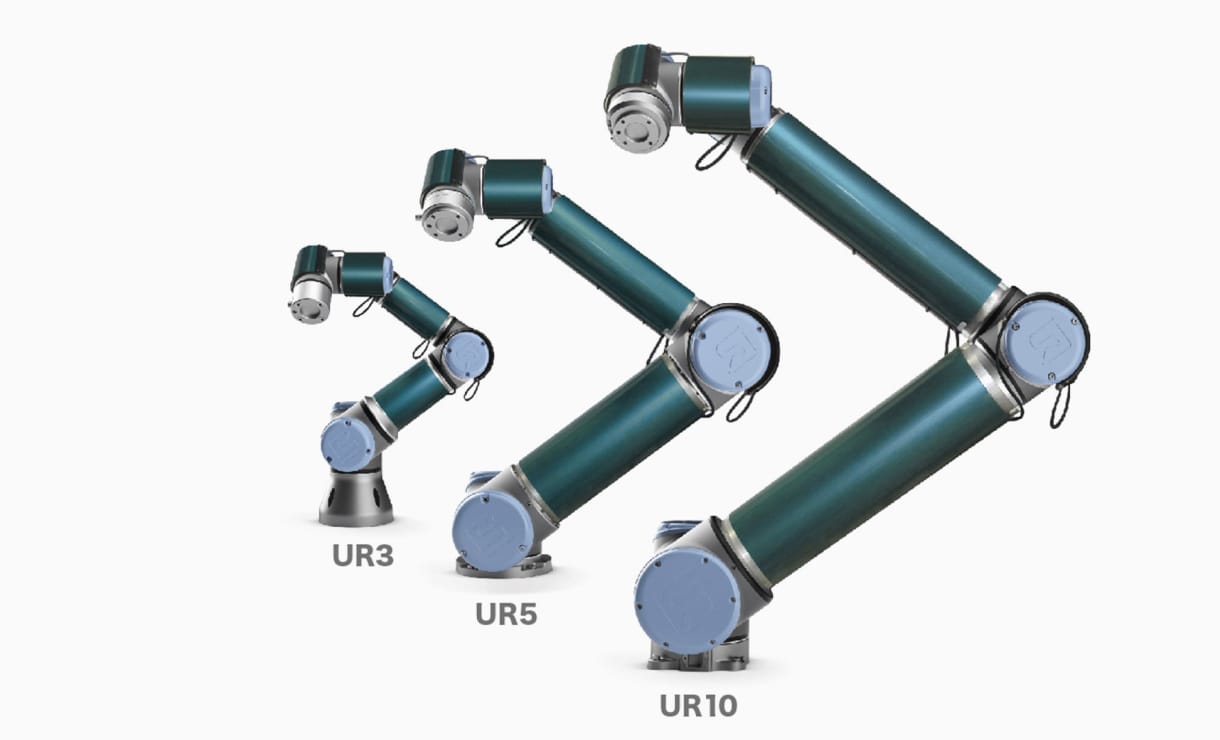
製品ラインナップ
産業用人協調ロボット UR3 / UR5 / UR10
技術仕様
| 仕様/モデル | UR3 | UR5 | UR10 |
|---|---|---|---|
| 構造 | 垂直多関節形(6自由度) | ||
| ロボット本体重量 | 11.0㎏ | 18.4㎏ | 28.9㎏ |
| 可搬重量 | 3㎏ | 5㎏ | 10㎏ |
| 最大リーチ | 500mm | 850mm | 1300mm |
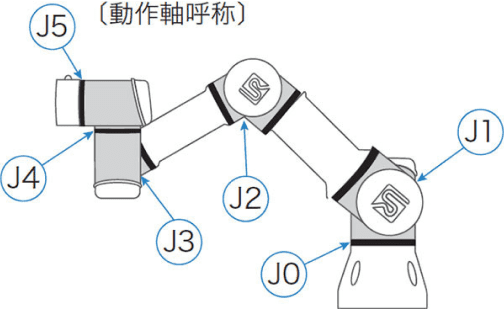
| 動作範囲※1 | 無限回転(J5)/ ±360°(J0~J4軸) | 全軸±360° | |
| 最大速度 | 180°(J0~J2 軸)/ 360°(J3~J5軸)/ 秒TCP 速度 1m/秒 | 180°(全軸)/ 秒TCP 速度 1m/秒 | 120°(J0, J1 軸)/ 180°(J2~J5軸)/ 秒TCP 速度 1m/秒 |
| 繰返し位置決め精度 | ±0.1㎜ | ||
| 設置寸法 | φ118mm | φ149mm | φ190mm |
| プログラミング方式 | 12インチ・カラータッチパネル・ダイレクトティーチ | ||
| 保護等級(アーム) | IP64 | IP54 | |
| ISOクラスクリーンルーム | 5 | ||
| 設置環境温度 | 0~50℃(結露なきこと) | ||
| 電源容量 | 最大100W | 最大200W | 最大350W |
| 協働作業が可能 | ISO 10218-1(5.10.1, 5.10.5)JIS B 8433-1 | ||
| 動作停止の衝撃力 | 50N~150N(オプション:≦5 N※2) | 100N~150N(オプション:≦5 N ※2 ) | |
- ネジレ強度については別途お問い合わせください。
- 仕様は予告なく変更することがあります。(2018年4月現在)
-
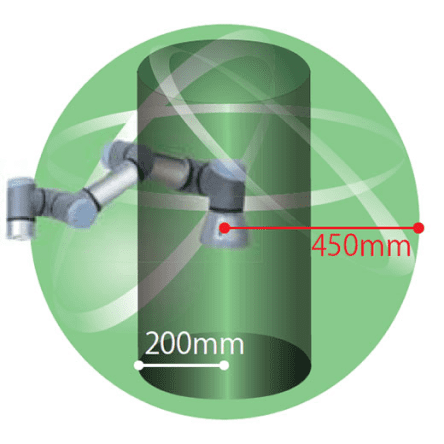 UR3
UR3
-
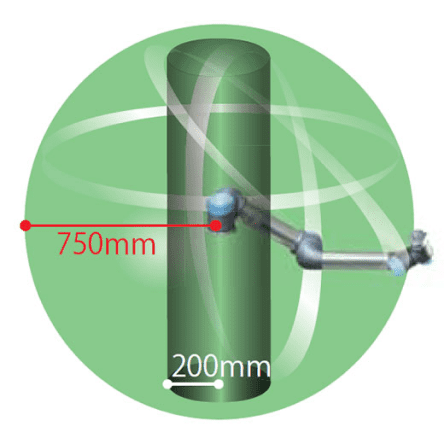 UR5
UR5
-
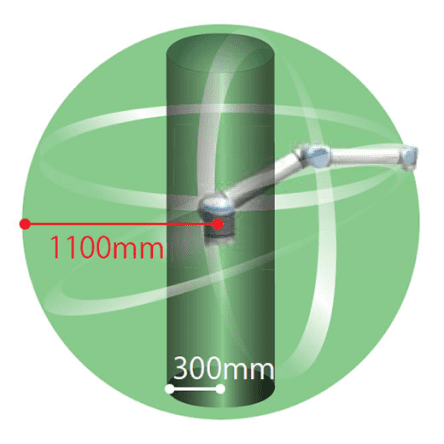 UR10
UR10
コントロールボックス仕様
| IP等級 | IP20 |
|---|---|
| ISOクラスクリーンルーム | 6 |
| 騒音 | 65dB(A) |
| 入出カポート |
デジタル入力16 アナログ入力2 デジタル出力16 アナログ出力2 |
| 入出力電源 |
24V2A
TCP/IP lOOMbit、ModbusTCP、Profinet、EthernetlP 単相 AC100 V~240 V, 50 / 60Hz |
| コントロールポックスのサイズ(W×H×D) | 475mm × 423mm × 268mm |

ティーチペンダント仕様
| IP等級 | IP20 |
|---|---|
| ISOクラスクリーンルーム | 6 |
| 騒音 | 65dB(A) |
| 入出カポート |
デジタル入力16 アナログ入力2 デジタル出力16 アナログ出力2 |
| 入出力電源 |
24V2A
TCP/IP lOOMbit、ModbusTCP、Profinet、EthernetlP 単相 AC100 V~240 V, 50 / 60Hz |
| コントロールポックスのサイズ(W×H×D) | 475mm × 423mm × 268mm |